-
Ref.


-
Target



-
LIOP

-
SIFT

-
DAISY

-
DaLI

-
DaLI-PCA




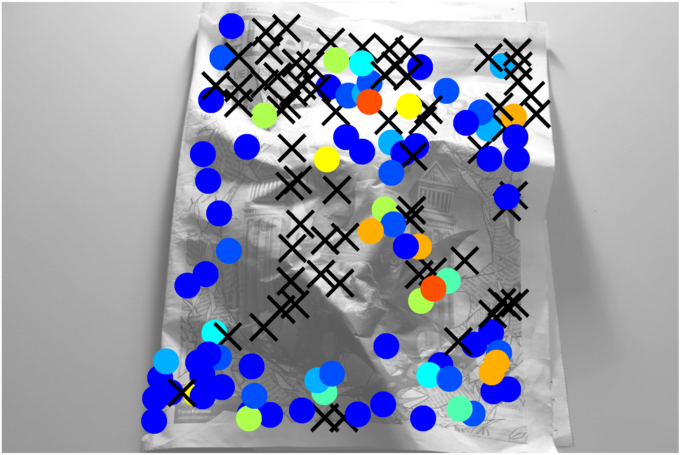
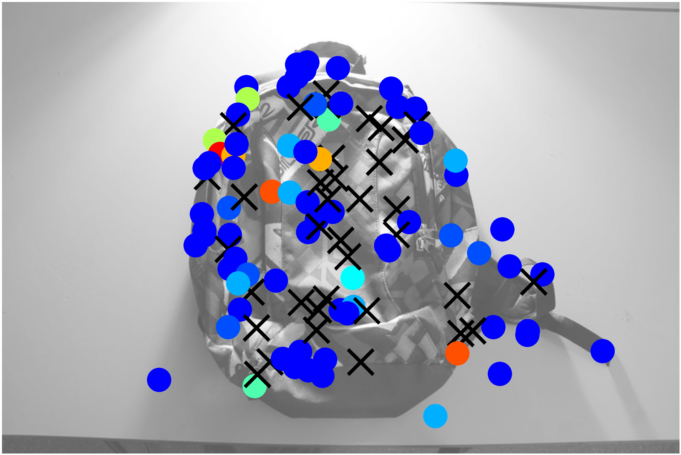
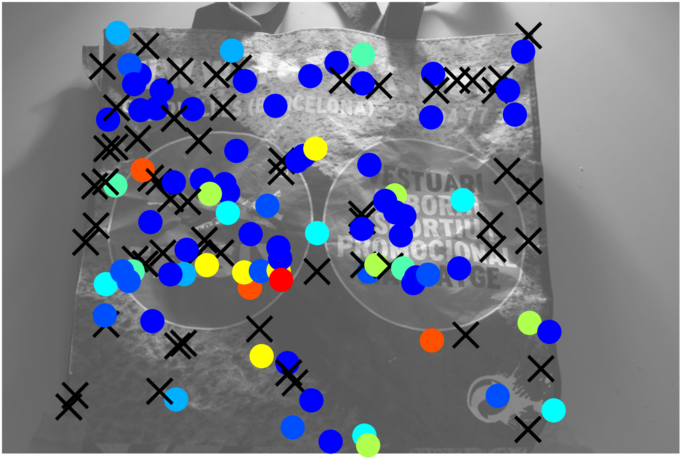
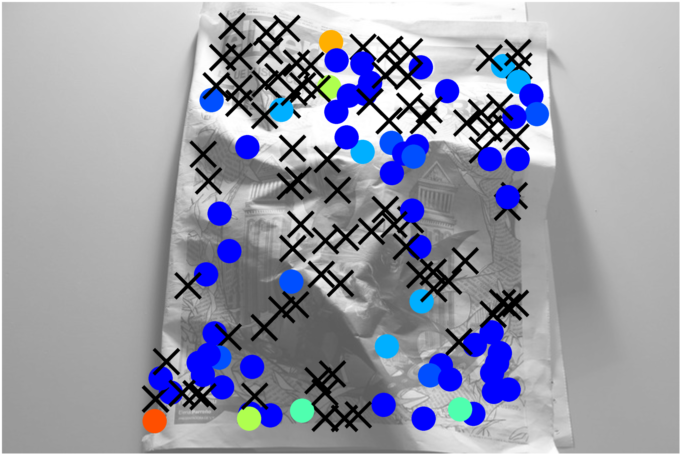
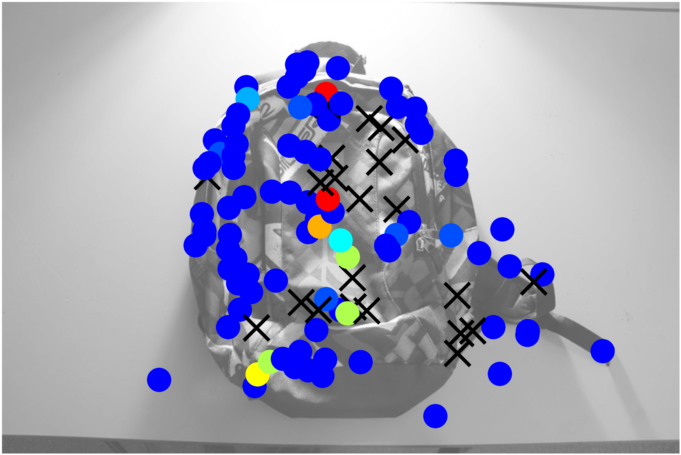
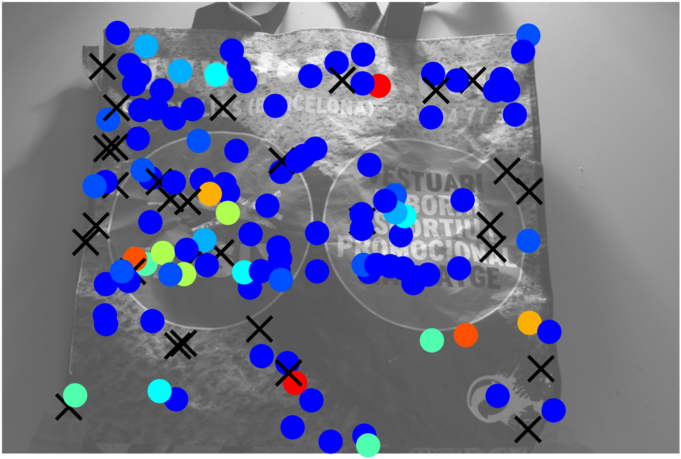
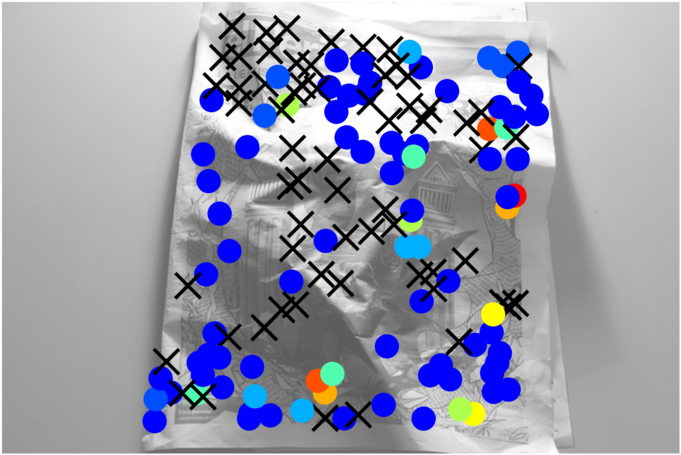
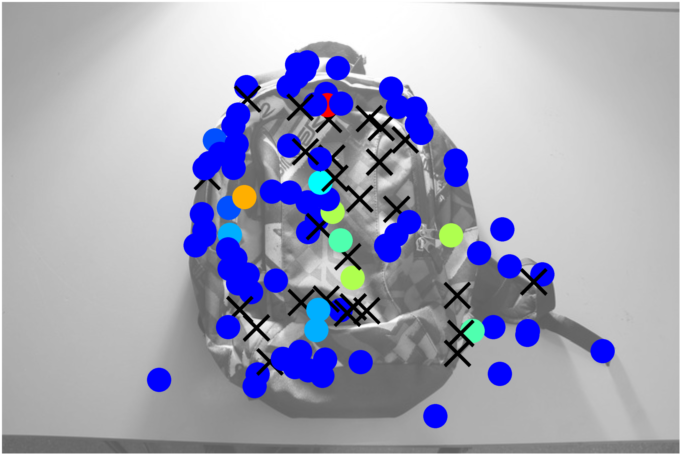
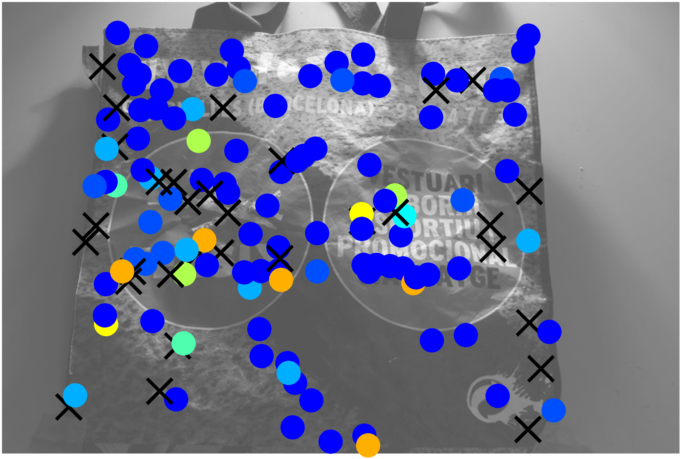
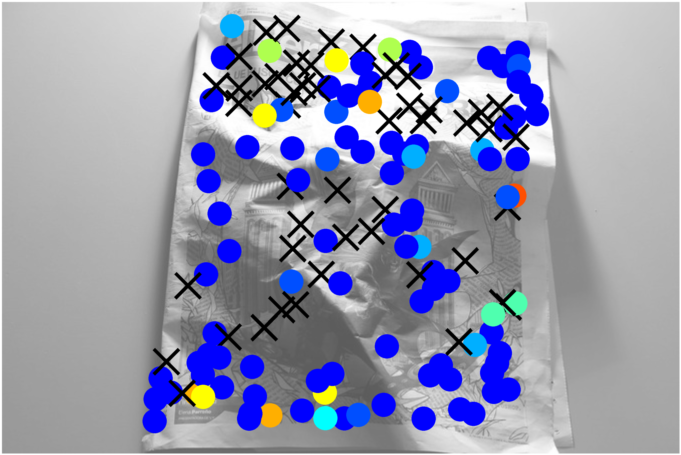
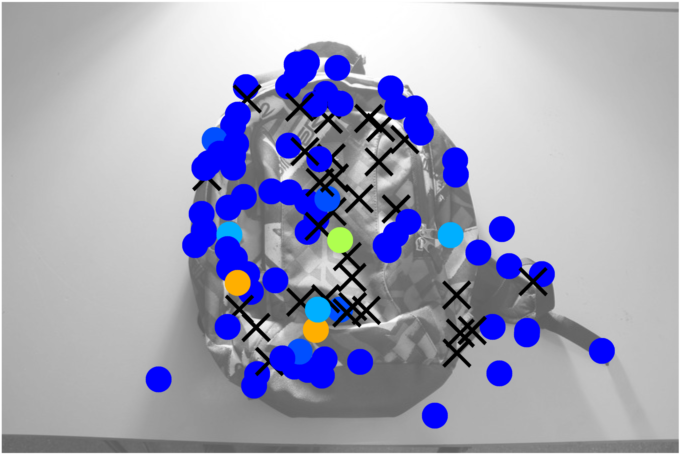
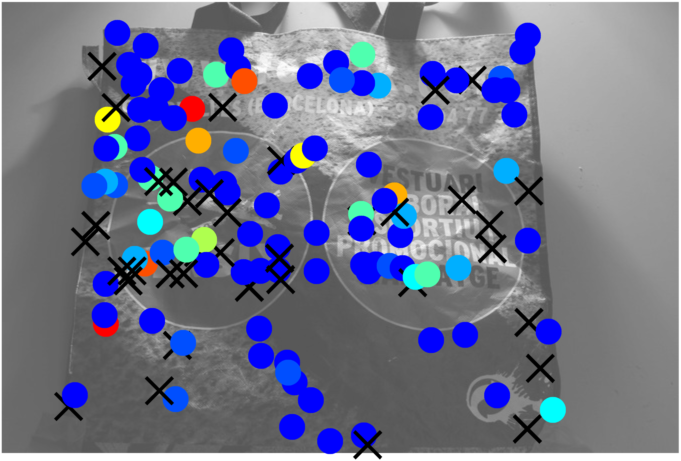

We make the full dataset that appears in the paper available to anyone who wishes to use it. We include the code to reproduce the main figures in the paper. This dataset consists of 192 unique 640x480 grayscale images corresponding to 12 different objects. Points of interest obtained by the Difference of Gaussians (DoG) detector are provided and matched across different pairs of images. We provide three different evaluations:
- Deformation only (
test_deform.m) - Illumination only (
test_illum.m) - Both deformation and illumination (
test_both.m)
To reproduce the results in the paper start by downloading and unpacking the dataset:
wget https://esslab.jp/~ess/data/dali_dataset.tar.bz2
tar xvjf dali_dataset.tar.bz2
cd dali_datasetNext run matlab and from matlab call:
test_both % or test_deform, test_illum depending on what you wish to evaluateThis will extract the patches and start evaluating different descriptors. However,
it will not evaluate the DaLI descriptor as it is unable to be run under matlab due to
library conflicts. In order to also compute the DaLI descriptor please run the same
command from octave after uncommenting main_desc_dali in
init_final_desc.m. Note that once the results are obtained they can also
be loaded under matlab.
In order to calculate the DaLI-PCA descriptor it is necessary to compute the DaLI
descriptor first, then run the dalipca.m script from matlab. This will
generate the cached descriptor files for the descriptor. It is then possible to
uncomment main_desc_dalipca in init_final_desc.m which will
allow obtaining results with both matlab and octave.
To summarize all the steps:
- Download and unpack dataset
- Run
test_both,test_illumandtest_deformfrom matlab - Uncomment
main_desc_dalifrominit_final_desc.m - Run
test_both,test_illumandtest_deformfrom octave - Run
dalipca - Uncomment
main_desc_dalipcafrominit_final_desc.m - Run test_both, test_illum and test_deform from matlab
As we know this is fairly complicated we also provide the results files for
all the descriptors, which allow you to directly uncomment all the descriptors in
init_final_desc.m directly after unpackaging this. It will also allow you
to avoid having to spend many hours computing descriptors.
To compare against your descriptor, please look at
descriptors/main_desc_dali.m as an example of how to create the descriptor
structure. It is then as simple as adding a new line to
init_final_desc.m.
Notes
-
All results in the paper were obtained on a x86_64 machine running Ubuntu 12.04 LTS using Matlab 7.14.0.739 (R2012a) and Octave 3.2. On other platforms and software versions results may differ from the paper.
-
The GIH descriptor is not provided as the only available implementation can only be run on the 32 bit Windows operating system.
-
There is an additional deformation level that does not appear in the paper and is disabled by default.
Citing
If you use this dataset, please cite
@Article{SimoSerraIJCV2015,
author = {Edgar Simo-Serra and Carme Torras and Francesc Moreno Noguer},
title = {{DaLI: Deformation and Light Invariant Descriptor}},
journal = {International Journal of Computer Vision (IJCV)},
volume = {115},
number = {2},
pages = {136--154},
year = 2015,
}