This research consisted in improving the computational efficiency, improving performance and looking at more specific details at why this descriptor is able to obtain results. We make both the descriptor code and the dataset presented in the paper publicly available. For more details please refer to the journal paper.

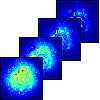
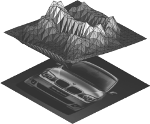
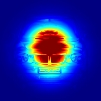
The DaLI is a descriptor built by embedding the image patch as a surface and then using the Heat Kernel Signature to calculate the heat diffusion along the surface. In order to become invariant to illumination changes, logarithmic sampling along with the Fast Fourier Transform is employed. A flowchart of how the descriptor and its compressed (PCA) variant is constructed is shown above. The percentages indicate the computation time spent on each step. An example of a DaLI descriptor is shown below.
- Frequency 1
- Frequency 2
- Frequency 3
- Frequency 4
- Frequency 5
- Frequency 6

DaLI Dataset
-
Ref.


-
Target



-
LIOP

-
SIFT

-
DAISY

-
DaLI

-
DaLI-PCA




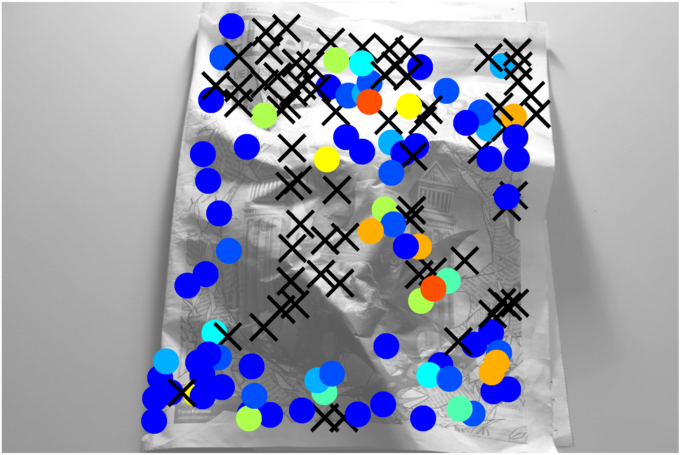
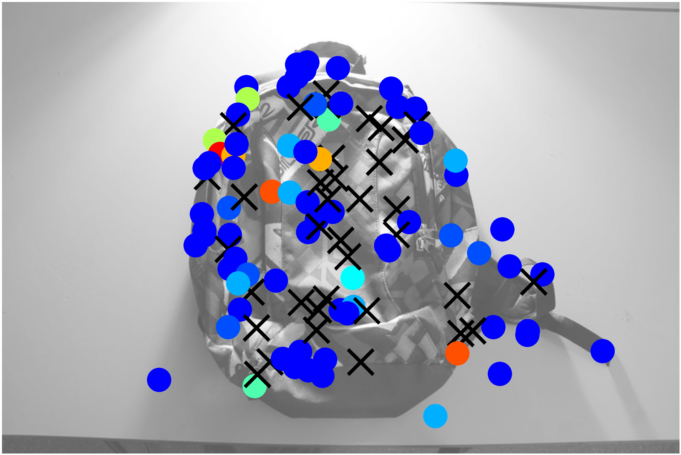
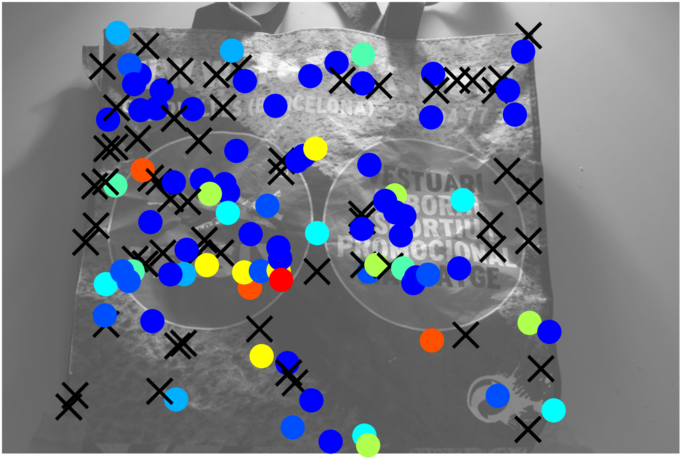
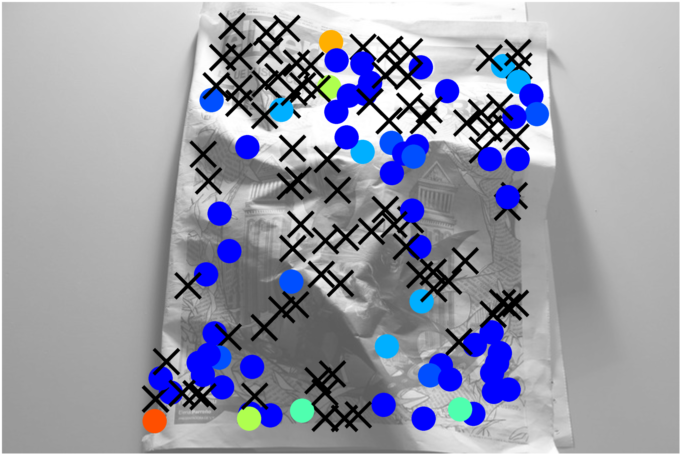
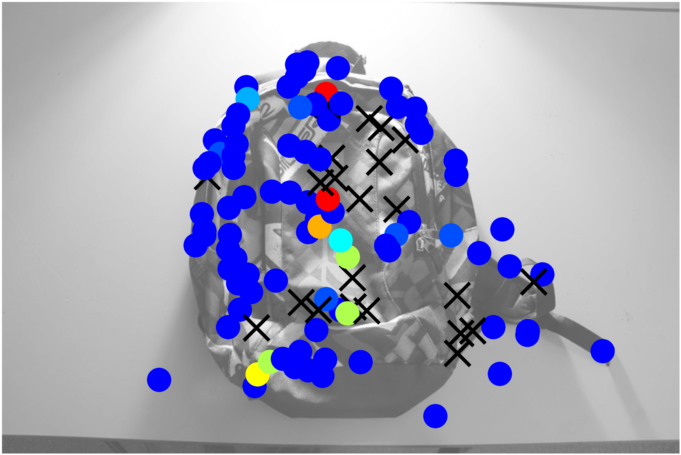
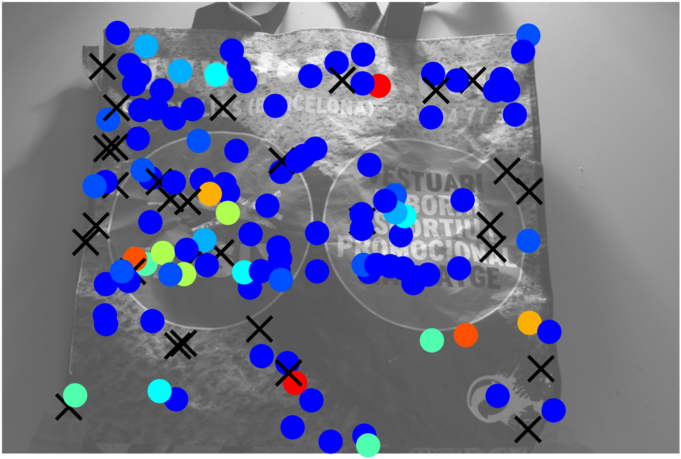
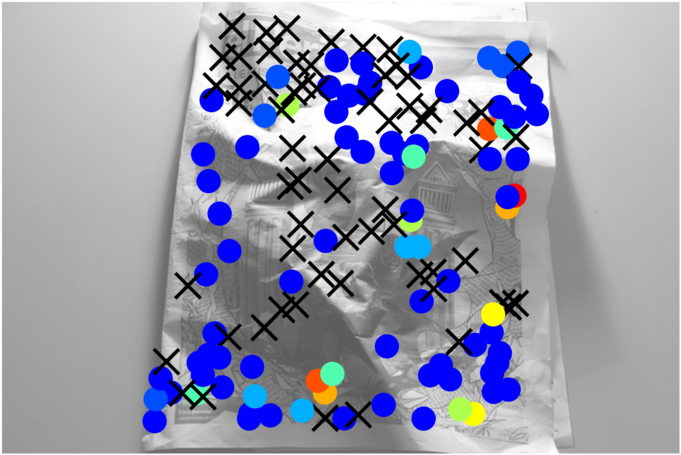
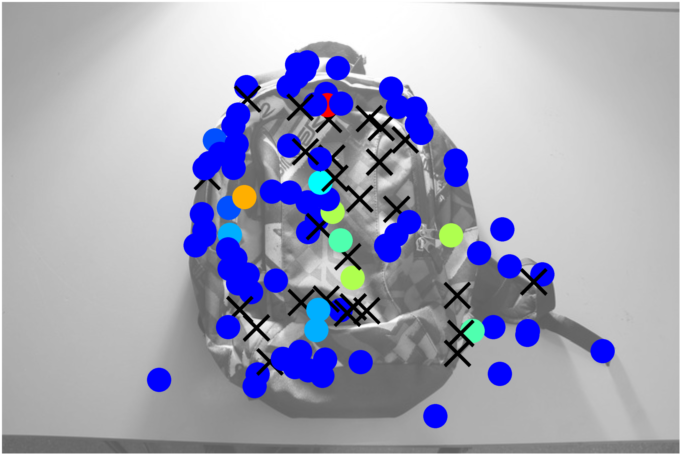
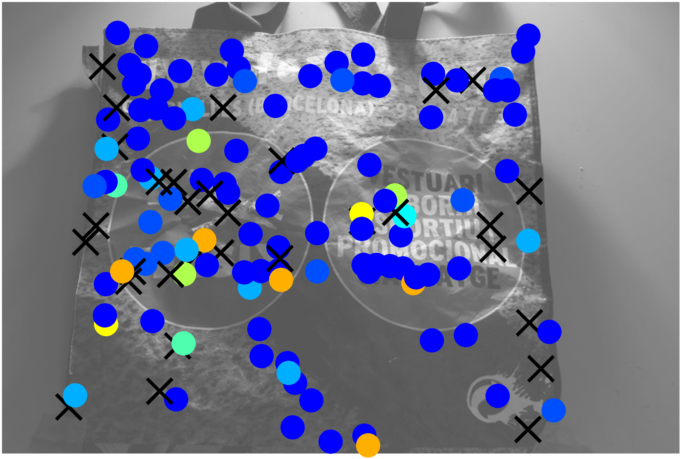
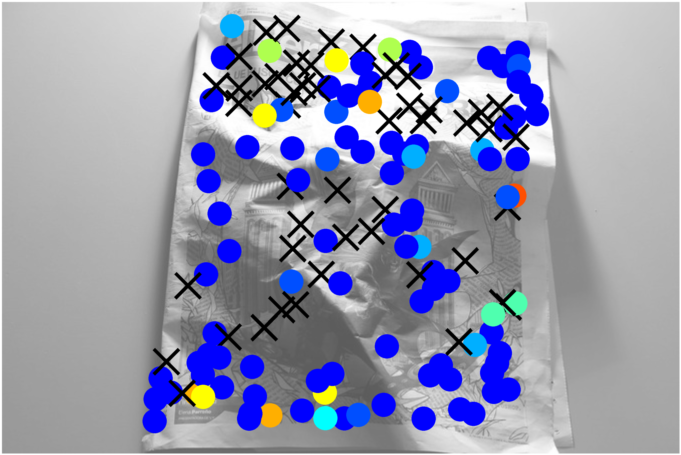
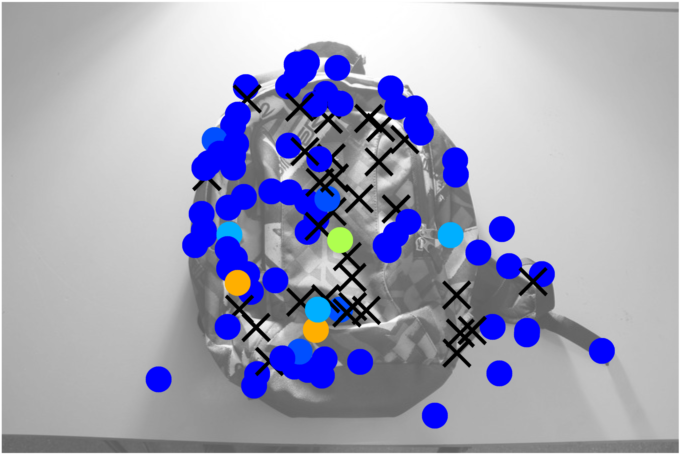
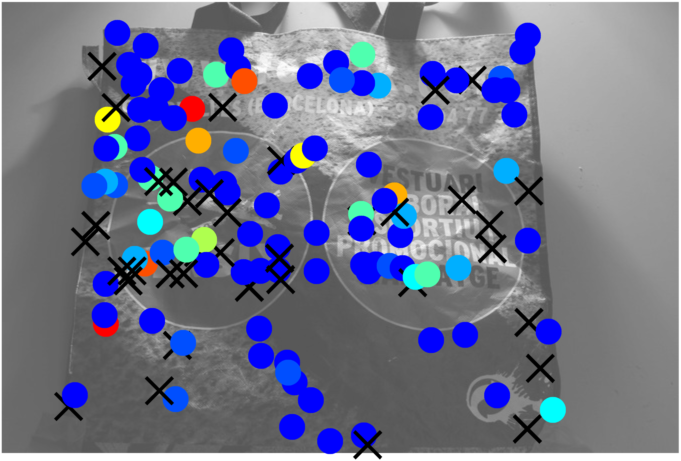

We make the full dataset that appears in the paper available to anyone who wishes to use it. We include the code to reproduce the main figures in the paper. This dataset consists of 192 unique 640x480 grayscale images corresponding to 12 different objects. Points of interest obtained by the Difference of Gaussians (DoG) detector are provided and matched across different pairs of images.
Please refer to the dataset page for full details.
Notes
-
All results in the paper were obtained on a x86_64 machine running Ubuntu 12.04 LTS using Matlab 7.14.0.739 (R2012a) and Octave 3.2. On other platforms and software versions results may differ from the paper.
-
The GIH descriptor is not provided as the only available implementation can only be run on the 32 bit Windows operating system.
-
There is an additional deformation level that does not appear in the paper and is disabled by default.
Video Sequence
We have also evaluated the descriptor on two real world sequences taken from:
Francesc Moreno-Noguer, Pascal Fua
Stochastic Exploration of Ambiguities for Nonrigid Shape Recovery
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013
The results are shown in the paper. As a supplement to the paper we show the full sequence with the relative improvement of DaLI over DAISY below: