CGO 12-3: Colorization
Jupyter Notebookのファイルをここからダウンロードしてください。
CGO 12-3: Colorization
Let there be Color!: Joint End-to-end Learning of Global and Local Image Priors for Automatic Image Colorization with Simultaneous Classification Satoshi Iizuka*, Edgar Simo-Serra*, Hiroshi Ishikawa (* equal contribution) ACM Transactions on Graphics (SIGGRAPH), 2016
About colorization
Objectives
- Test baseline
- Finish implementing global and local network
- Explain why the global feature network helps (hint: spatial resolution)
- Add classification loss (hint: it is possible to modify forward() to return multiple values. Set the classification loss to 1/300 of the reconstruction loss)
PUT ANSWER TO WHY GLOBAL FEATURES HELP HERE
import torch
import torch.nn as nn
import torch.nn.functional as F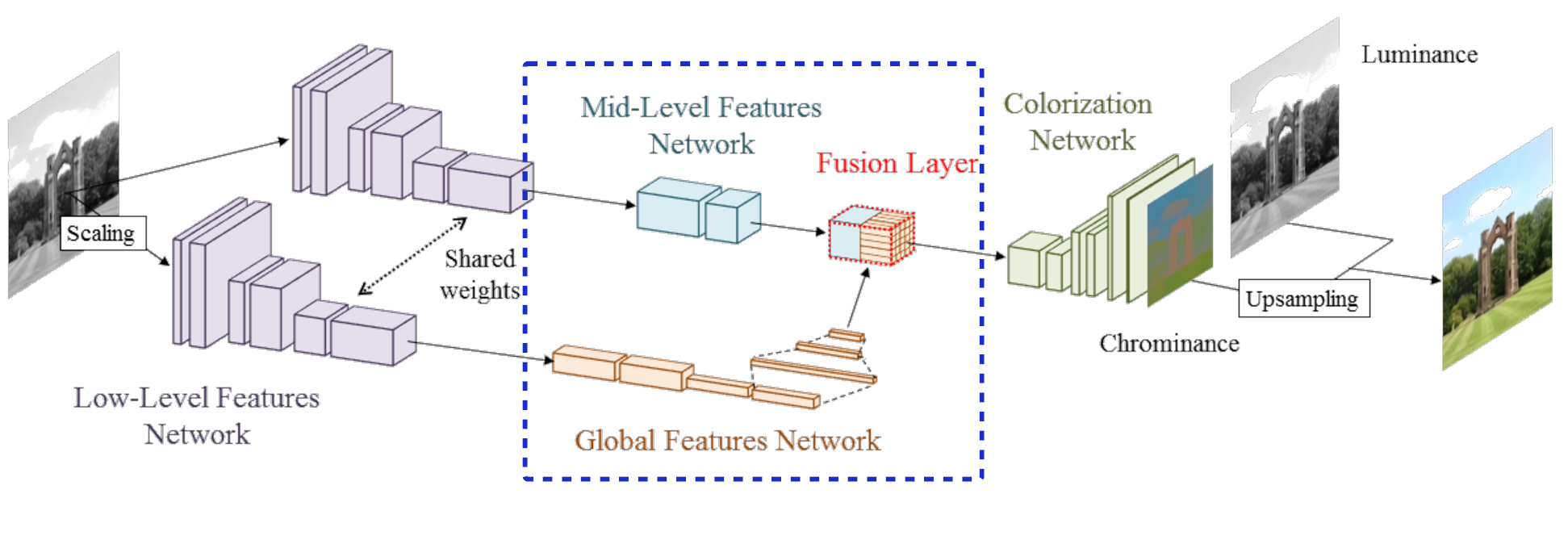
Regarding the model
- Conv: convolutional layer
- FC: fully connected layer
- Fusion: fusion layer
- Upsample: upscaling layer
- Apply TanH to ouptut
Improvements
- Reduced filters from 512 to 256
- Last layer restores to original resolution
class ConvLayer(nn.Module):
def __init__(self, fan_in, fan_out, kernel=3, stride=1, padding=1, upscale=None):
super(ConvLayer, self).__init__()
self.conv = nn.Conv2d( fan_in, fan_out, kernel_size=kernel, stride=stride, padding=padding, bias=False )
self.bn = nn.BatchNorm2d( fan_out )
self.upscale = upscale
def forward(self, x):
if self.upscale != None:
x = F.interpolate( x, scale_factor=self.upscale, mode='bilinear', align_corners=False)
return F.relu( self.bn( self.conv(x) ) )
''
class FCLayer(nn.Module):
def __init__(self, fan_in, fan_out ):
super(ConvLayer, self).__init__()
self.fc = nn.Linear( fan_in, fan_out )
self.bn = nn.BatchNorm( fan_out )
def forward(self, x):
return F.relu( self.bn( self.fc(x) ) )
class FusionLayer(nn.Module):
def __init__(self, fan_in, fan_out, inner_size ):
super(FusionLayer, self).__init__()
self.conv = ConvLayer( fan_in, fan_out, kernel=1, padding=0 )
self.inner_size = inner_size
def forward(self, l, g):
x = torch.cat( [l, g.repeat(1,1,self.inner_size,self.inner_size)], dim=1 )
return self.conv(x)Model Class
class Net(nn.Module):
def __init__(self, use_global=True, use_tanh=True):
super(Net, self).__init__()
self.use_global = use_global
self.use_tanh = use_tanh
self.lowlevel = nn.Sequential(
ConvLayer( 1, 64, stride=2 ), # 64
ConvLayer( 64, 128 ),
ConvLayer( 128, 128, stride=2 ), # 32
ConvLayer( 128, 256 ),
ConvLayer( 256, 256, stride=2 ), # 16
ConvLayer( 256, 256 )
)
self.midlevel = nn.Sequential(
ConvLayer( 256, 256 ),
ConvLayer( 256, 256 )
)
if self.use_global:
self.globalfeat = nn.Sequential(
ConvLayer( 256, 256, stride=2 ), # 8
ConvLayer( 256, 256 ),
ConvLayer( 256, 256, stride=2 ), # 4
ConvLayer( 256, 256 ),
ConvLayer( 256, 512, kernel=4, padding=0 ), # 1
ConvLayer( 512, 256, kernel=1, padding=0 )
)
self.fusion = FusionLayer( 512, 256, 16 )
self.classifier = nn.Sequential(
ConvLayer( 256, 128, kernel=1, padding=0 ),
nn.Conv2d( 128, 6, kernel_size=1, padding=0 )
)
self.colorization = nn.Sequential(
ConvLayer( 256, 128 ),
ConvLayer( 128, 64, upscale=2. ),
ConvLayer( 64, 64 ),
ConvLayer( 64, 32, upscale=2. ),
ConvLayer( 32, 16, upscale=2. ),
nn.Conv2d( 16, 2, kernel_size=3, padding=1 )
)
def forward( self, x ):
l = self.lowlevel( x )
m = self.midlevel( l )
c = self.colorization( m )
if self.use_tanh:
c = torch.tanh( c )
return torch.cat( [x, c], dim=1 )Preparing data
Download from here and
unzip into ../data.
- 6 classes from places (bamboo_forest, coast, corn_field, sea_cliff, tree_farm, volcano)
- class labels available
- Converted to CIE Lab colorspace
import torchvision
from skimage import color
import numpy as np
from PIL import Image
import random
def lab_loader(path):
# open path as file to avoid ResourceWarning (https://github.com/python-pillow/Pillow/issues/835)
with open(path, 'rb') as f:
img = Image.open(f)
rgb = img.convert('RGB')
lab = color.rgb2lab(rgb)
return lab.astype(np.float32)
transform = torchvision.transforms.Compose([
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize((50,0,0,), (50,128,128,))
])
data = torchvision.datasets.ImageFolder('../data/tinyplaces/', transform=transform, loader=lab_loader)
idx = list(range(len(data)))
random.shuffle(idx)
idx = idx[0:10000]
limit = int(0.1*len(idx))
test_idx = idx[:limit]
train_idx = idx[limit:]
train_sampler = torch.utils.data.sampler.SubsetRandomSampler( train_idx )
train_loader = torch.utils.data.DataLoader( data, batch_size=16, sampler=train_sampler )Create model and optimization approach
device = torch.device("cuda" if (torch.cuda.device_count()>0) else "cpu")
model = Net().to(device)
optimizer = torch.optim.Adadelta( model.parameters() )Training loop
loss_log = []from tqdm import tqdm
model.train()
t = tqdm(train_loader)
for x,y in t:
optimizer.zero_grad()
x, y = x.to(device), y.to(device)
L = x[:,0:1,:,:].detach()
ab = x[:,1:3,:,:].detach()
pred = model(L)
loss = torch.pow( pred-x, 2 ).mean()
t.set_postfix( loss=loss.item() )
loss_log.append( loss.item() )
loss.backward()
optimizer.step()%matplotlib inline
import matplotlib.pyplot as plt
plt.plot( loss_log, label='Loss' )
plt.legend( frameon=False )Results
import torchvision
import matplotlib.pyplot as plt
def tolab( x ):
x = x[0].clone()
x[0,:,:] = 50 + 50*x[0,:,:]
x[1,:,:] *= 128
x[2,:,:] *= 128
return torch.Tensor( color.lab2rgb( x.permute(1,2,0) )).permute(2,0,1).unsqueeze(0)
model.eval()
N = 10
I = torch.zeros( N*2, 3, 128, 128 )
with torch.no_grad():
for i,idx in enumerate(test_idx[:N]):
x = data[idx][0].unsqueeze(0)
L = x[:,0:1,:,:]
ab = x[:,1:3,:,:]
pred = model(L.to(device)).cpu()
I[i,:,:,:] = tolab( x )
I[N+i,:,:,:] = tolab( pred )
I = torchvision.utils.make_grid( I, nrow=5 )
plt.imshow( I.permute(1, 2, 0) )Spatial resolution
I = torch.zeros(1,1,128,128)
I[0,0,63,63] = 1
m = Net( use_global=True, use_tanh=False )
for name, p in m.named_parameters():
if 'weight' in name:
nn.init.constant_(p,1)
elif 'bias' in name:
nn.init.constant_(p,0)
m.double()
m.eval()
with torch.no_grad():
I = m( I.double() )
plt.imshow(I[0,1,:,:] / I[0,1,:,:].max() )Display model
https://github.com/waleedka/hiddenlayer
Install
conda install graphviz python-graphviz
pip install hiddenlayer
import hiddenlayer as hl
hl.build_graph( model.cpu(), torch.zeros([1, 1, 128, 128]) )